แผนการก่อสร้าง
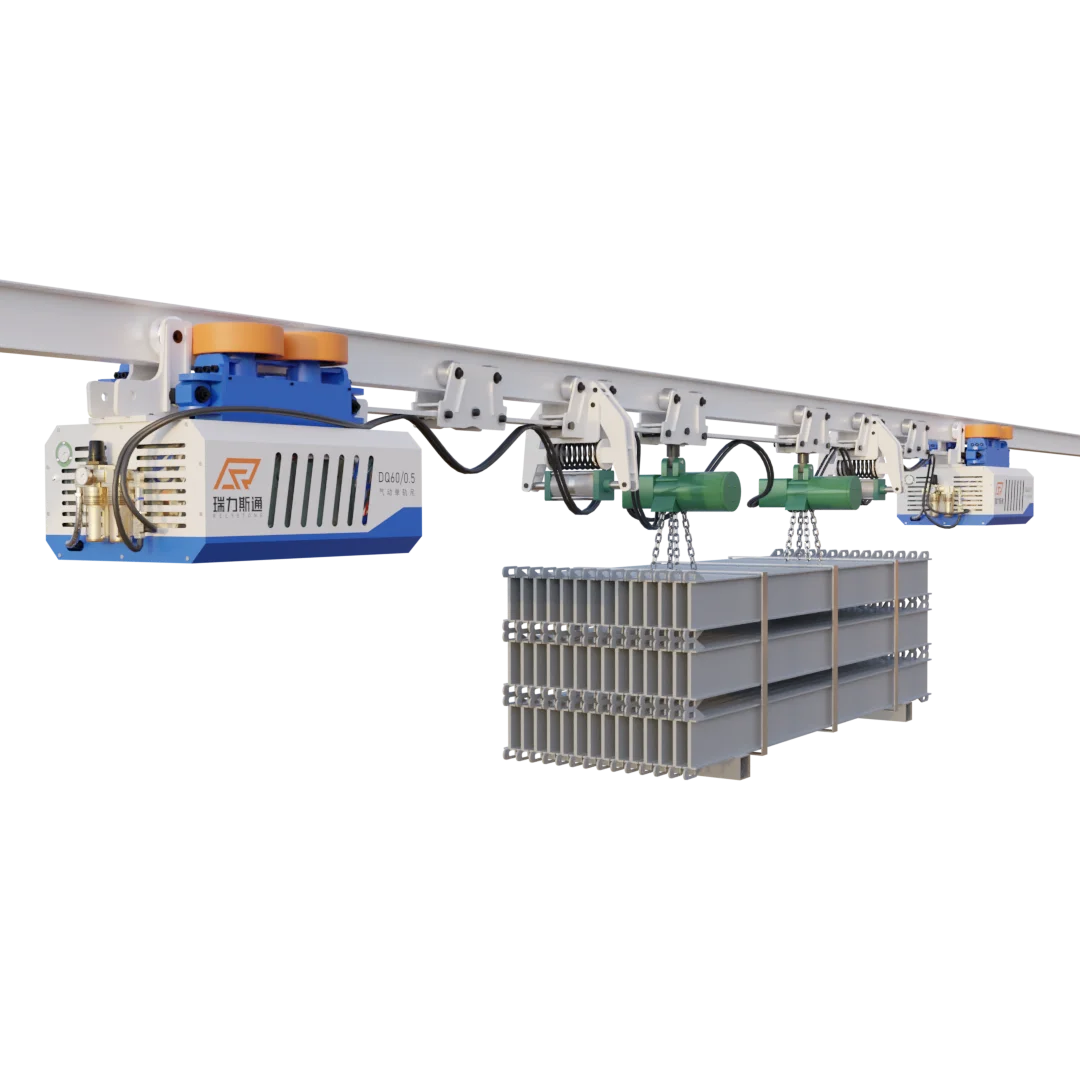
เครื่องขุดโบลต์ + ระบบควบคุมอัจฉริยะระยะไกล + สว่านสมอไฮดรอลิก + หางเคลื่อนย้ายได้เองสำหรับสายพานลำเลียง + ยานพาหนะขนส่งตีนตะขาบ / เครนรางเดี่ยวแบบนิวแมติก

เทคโนโลยีการก่อสร้าง
1. เครื่องขุดโบลต์ทำการตัด การรองรับชั่วคราว สลักเกลียวและส่วนรองรับสายเคเบิล และการดำเนินการเจาะแบบหัวบน
2. แท่นขุดเจาะสมอไฮดรอลิกจะติดตั้งสายเคเบิลสมอด้านหลังเครื่องขุดเจาะกระจกและดำเนินการติดตั้งเครนรางเดี่ยว
3. ส่วนท้ายของสายพานลำเลียงแบบเคลื่อนย้ายได้เองนั้นมาพร้อมกับระบบกำจัดฝุ่นเพื่อเคลื่อนไปข้างหน้าโดยอัตโนมัติ
4. ยานพาหนะขนส่งตีนตะขาบหรือเครนโมโนเรลเบาแบบนิวแมติกมีหน้าที่รับผิดชอบในการขนส่งอุปกรณ์และวัสดุขนาดเล็กแบบ head-on
5. ติดตั้งเครื่องกำจัดฝุ่นแบบแห้ง (เปียก) อัจฉริยะเพื่อตรวจสอบและควบคุมฝุ่นระหว่างการขุด
6. ระบบควบคุมอัจฉริยะระยะไกลดำเนินการควบคุมระยะไกลบนเครื่องเจาะอุโมงค์ และมีฟังก์ชันต่างๆ เช่น การตรวจสอบวิดีโอ การตรวจสอบสถานะ การวินิจฉัยข้อผิดพลาด การเตือนด้วยเสียงและภาพ การตรวจสอบท่าทาง และการตัดอัตโนมัติ
คุณสมบัติทางเทคนิค
1. การลดกำลังคน: มีคนจ้างงานด้านสนับสนุน การขนส่ง และการเชื่อมโยงอื่นๆ น้อยลง และจำนวนคนทำงานโดยตรงต้องไม่เกิน 9 คน
2. มีประสิทธิภาพ: หลายหน่วยงานร่วมมือกับการปฏิบัติงานด้วยเครื่องจักรเพื่อเพิ่มประสิทธิภาพการขุดมากกว่า 30%
3. การประหยัดแรงงาน: ความเข้มแรงงานของพนักงานลดลงอย่างมาก
4. ความปลอดภัย: ระดับการใช้เครื่องจักรที่ครอบคลุมอยู่ในระดับสูง และความปลอดภัยในการดำเนินงานได้รับการปรับปรุงอย่างมีนัยสำคัญ
 ข่าวด่วน
ข่าวด่วน2024-02-18
2024-02-19
2024-02-06

 EN
EN
 AR
AR BG
BG HR
HR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO NO
NO PL
PL RU
RU ES
ES TL
TL ID
ID SR
SR SK
SK UK
UK VI
VI HU
HU TH
TH TR
TR MS
MS GA
GA EO
EO LA
LA MN
MN TG
TG UZ
UZ